联系人:陈工
电话:17856035060
联系人:高工
电话:13063301552
地址:安徽省滁州市泉州路与新安江路交叉口西南侧苏滁现代产园4号厂区8栋二楼
座机:0550-2201055
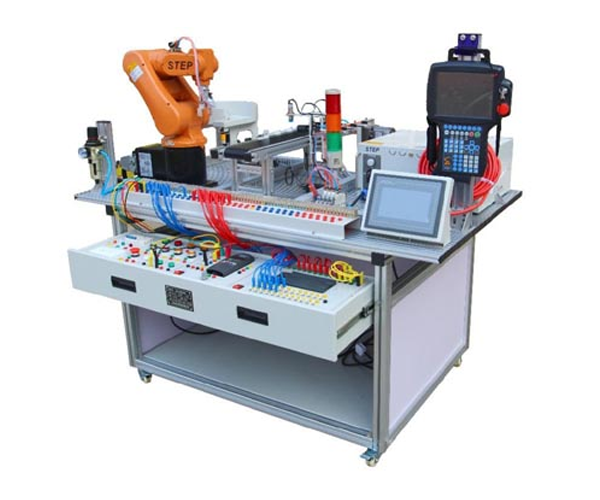
一、 机器人光电一体化实训装置 概述
机器人分拣实训系统是为了尽快的适应各个领域的发展,能在减少的课时内高质量的完成内容多、理论结合实际结合性强、技术涉及面广的机电一体化教学课程。符合各院校的教学实验需求。培养出大量的能熟练掌握及开发运用机器人、PLC、变频器、触摸屏、传感器检测、气动执行控制、机械设计装配调试等技术的技术工人、技术员、工程师、输送到各条战线。
上海华育公司经过精心设计推出:工业机器人光机电一体化高速分拣实训系统。以下简称:高速分拣系统。它实现了生产线的传感检测、传输处理、智能控制、与执行驱动。它涉及到机器人技术、机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等机电一体化专业的基础专业知识和基本机电技能要求。
本系统在铝合金导轨式实训台上安装有送料、机器人搬运、材料分拣的三个基本工作机构单元,构成一个典型的自动生产线的机械平台。系统机构采用了气缸驱动、变频器调速驱动、直流电机驱动。系统的控制方式采用了PLC及触摸屏控制等技术。采用模块组合式的结构,各工作单元是相对独立的模块,并采用了标准结构和抽屉式模块,具有较强的互换性。
二、特点
1、高速分拣系统机器人系统
具有6个自由度,串联关节型工业机器人,工作半径为500mm,有效负载5kg,重复定位精度±0.02mm,机器人本体重量28kg,第1轴工作范围为+170°/-170°,旋转速度370°/s,第2轴工作范围为+110°/-110°,旋转速度370°/s,第3轴工作范围为+40°/-220°,旋转速度430°/s,第4轴工作范围为+185°/-185°,大旋转速度300°/s,第5轴工作范围为+125°/-125°,大旋转速度460°/s,第6轴工作范围为+360°/-360°,大旋转速度600°/s。工业机器人示教器及驱控一体机。
2、高速分拣系统配备有多种类传感器
我公司推出的光机电一体化高速分拣实训系统,配备了多种类型的工业常用传感器,提升了设备机构工作状况的信号数据采集能力,便于学生的编程与整个机构运行的可靠。能让学生更多的了解掌握各种传感器的原理及在实际工作中的运用,用不同的传感器实现相同或者不同的功能。同时,可以通过设备提供更多的技术考核内容(不同的传感器组合在一起就能给学生不同的考核题目),也能准确反映学生的知识的掌握程度。
3、高速分拣系统追求的目标:高速与稳定
作为一个自动控制系统追求目标是高速与稳定。否则,将失去任何意义。
通过精心的设计,高精密的生产工艺及反复的改进提升。我公司推出的光机电一体化高速分拣实训系统,可以实现每日34000次的送料、机械手搬运、分拣物料过程的不间断、无人值守自动工作。这是所有目前其他产品所无法匹敌的。
我们的稳定性指标要求认为:每分钟24次不等于每小时1440次,每小时1440次不等于每日34560次。
4、高速分拣系统采用电源容错保护电路
设计了电源容错保护电路,有效防止电源反接。即使学生操作时电源正负极反接,也不会损坏电气元件。让学生能够更大胆的进行实际的操作练习,让老师教学更轻松,同时减少了教学事故发生率,同时减少设备的维护。
综上所述,本系统为学生提供了一个典型的、可进行综合训练的工程环境,为学生构建了一个可充分发挥学生潜能和创造力的实践平台。在此平台上可实现知识的实际应用、技能的综合训练和实践动手能力的客观考核。
三、 技术参数
1、外形尺寸:1500(长)× 800(宽)× 1300(高) mm
2、净重量 / 毛重:112 Kg / 162 Kg
3、分拣速度:24次 / 分钟
4、连续自动分拣运行时间:24小时连续分拣次数:34000次/日
5、额定工作电源: AC:220V 50 Hz 总功率:1.2 Kw
6、额定工作气压:0.3-0.4 MPa
7、工作环境:温度-10℃~35℃相对湿度≤85%(25℃)
8、PLC控制器型号:西门子S7-200 CPU 226 AC/DC/RELAY控制器(附编程数据线和编程软件)
9、标配变频器:MM420 功率:0.37Kw
10、触摸屏:MCGS 7” 7062
11、上海STEP品牌SD500型 工业机器人
12、三相减速电动机:80YS25GY22 额定电压:3×220V 功率:25W 减速比:1:15
13、静音空压机:MB-550W- 9 额定电压:220V 功率:550W 排气量:110L/min 压力:0.75MPa
14、标配传感器:电容式接近开关、电感式接近开关、光纤传感器(放大器)、磁性开关、漫反射光电传感器
15、配备机械手机构硬件保护电路,防止程序控制错误,造成机械损坏。
四、 高速分拣实训系统实训项目
A、气动系统的安装与调试
(1)气动方向控制回路的安装(2)气动速度控制回路的安装(3)气动顺序控制回路的安装(4)气动机械手的安装(5)气动系统气路的连接(6)磁性开关的位置调整(7)气动系统调试(8)摆动控制回路的安装
B、变频器的安装与调试
(1)变频器与交流电机主电路的连接(2)变频器面板的参数设置与操作(3)变频器面板控制交流电机调速(4)通过变频器外部端子控制电机启停
C、机电设备的安装与调试
(1)传动装置同轴度的调整(2)皮带输送机的安装与调整(3)搬运机械手设备安装与调试(4)物件分拣设备的安装与调试(5)送料设备的安装与调试(6)自动生产线设备安装与调试
D、电气控制电路的安装与PLC编程
(1)电动机正反转控制电路的连接与程序编写(2)电动机调速控制电路的连接与程序编写(3)皮带输送检测程序编写(4)气动顺序动作控制程序编写(5)气动机械手控制程序编写(6)机电一体化设备控制程序编写(7)自动生产线控制程序编写
E、自动控制系统的安装与调试
(1)多种传感器的安装与调试(2)皮带输送检测的自动控制(3)机械手的自动控制(4)机电一体化的自动控制(5)PLC控制系统的安装与调试(6)自动生产线的安装与调试
F、触摸屏基本控制及设置
(1)触摸屏的接线和基本参数设置;(2)基于触摸屏控制方式的基本指令编程(3)PLC、触摸屏与变频器通信控制。
G、工业机器人实训
(6)工业机器人示教单元使用(7)工业机器人基本指令操作与位置点设置(8)工业机器人软件使用(9)工业机器人工件的跟踪抓取(10)工业机器人成品组装与入库